-
友情链接:
太丢人!台湾退役少将说:解放军到台北会迷路,因为没有谷歌卫星导航?
- 发布日期:2024-06-14 21:07 点击次数:116

最近,台湾知名“电子宠物”于北辰又在一档台媒节目中胡说八道了,他竟然说:解放军在进入台湾后一定会迷路,而理由就是到那时候Google肯定被屏蔽掉了,Siri也一样被禁,那没了这两样,解放军怎么可能找对路?
▲台海网报道
节目中的主持人也是对于北辰的荒谬言论极力配合,还说她自己到了新北都会迷路,看得军武菌简直是一脸的问号,可能他是把Google的导航服务当成GPS卫星导航的唯一途径了吧?

且不说Google在大陆都被限制服务多少年了,这Siri的导航服务除了有苹果手机的人用,还能有几个人在用,就说这GPS卫星导航真没了,咱们这仗就没法打了吗?

我们知道,行军打仗最先解决的就是从哪儿来到哪儿去的问题,这就是导航,就跟一个笑话描述的那样,一个人带着指南针却迷路,因为他只知道北在哪儿,可不知道他在哪儿。

所以说,要想完成导航,必须要知道起始点位置,还有正确的方向,如果有目的地的话,还得知道目的地在哪儿,只有这样才能告诉用户通往目的地的路径。

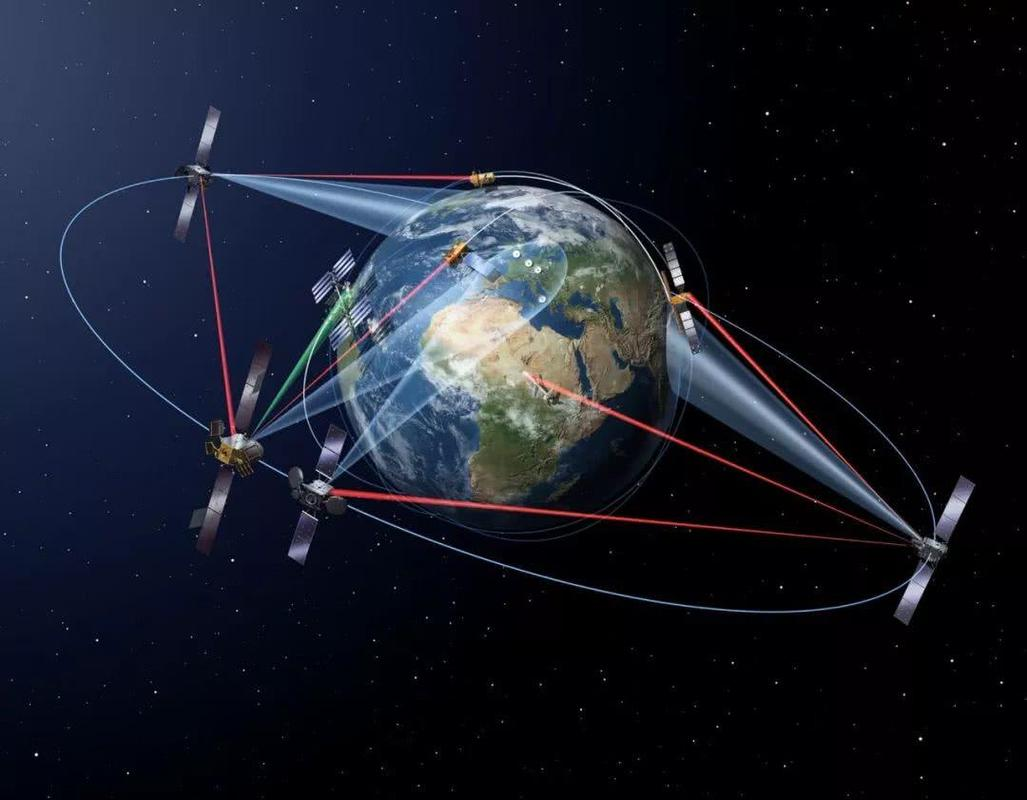
我们常说的卫星导航,用专业术语讲就是全球卫星导航系统(Global Navigation Satellite Systems,GNSS),是指使用卫星信号来确定用户接收机位置的系统。
GNSS分为空间段、控制段和用户段三部分构成,其中,空间段是卫星或航天器,控制段是地面监测站和主控中心,用户段是GNSS接收机。

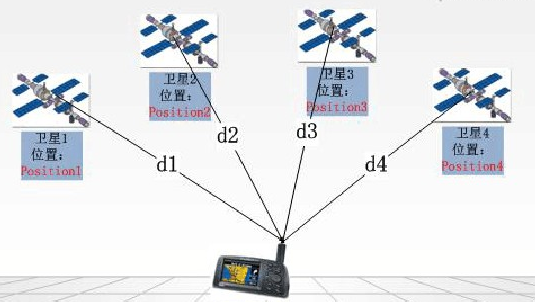
由于GNSS接收机使用导航电文中的传输时间和位置数据,测量卫星信号的时延,能由此计算接收机与卫星的距离,而距离某颗卫星特定距离的 GNSS接收机所有的可能位置就会构成了一个球面,当三个球面交会时就会得到两点,而地球表面上的接收机位置就可以作为第四个数据精确定位,这也就是最基础的三边测量法。
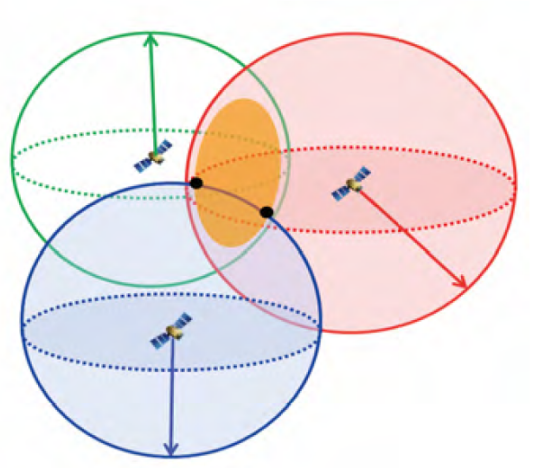
也就是说,要想将进行卫星导航,那至少要有三颗卫星在天上才行,如果有四颗卫星的话,则不仅可以确定接收机的经纬度和高度,还可以校正接收机的时钟误差,确定正确时间。
目前GNSS中,美国的GPS系统、中国的北斗系统和俄罗斯的 GLONASS系统处于完全运行状态,可以提供全球定位服务,欧盟的“伽利略”系统的可靠性一直很成问题。
在上述四种全球导航系统中,GPS系统由24颗工作卫星和4颗备用卫星组成,覆盖全球99%的地区,定位精度达到了0.1米的水平,是全球范围内精度最高、覆盖范围最广的导航定位系统。
北斗系统于2012年正式公布,由35颗工作卫星组成,覆盖全球100%的地区,尽管我国对外宣称北斗的定位精度是10米的水平,但实际测试过程中,通常情况下是2-3米,其中有一个频点的信号,在全世界定位精度最好可以达到1点几米。
而且这个公布出来的精度可能是平均值,在国内的区域测试中,应该更加精确,像70周年阅兵的时候,北斗系统就保障了受阅时各方队整体车速控制在10千米/小时,骑线偏差不超过1厘米。

在现代战争中,美国确实可以对一定区域的GPS进行了强干扰,或者加大民码误差,极端情况下会关闭民码的服务,这样就能使这个地区的导航服务被“切断”。
但问题是,这么干的话是不可能分敌我方的,要干扰的话那就所有GPS服务都被“切断”,解放军要用不了,台军一样用不了,可是解放军还有备用的北斗导航卫星啊。

要么台军使用干扰设备,大面积干扰和阻断作战区域内所有的卫星导航信号,甭管是GPS、GLONASS还是北斗,统统屏蔽掉,这就可以防止安装了卫星导航制导模块的精确制导武器直接命中本方目标。
但问题是,咱们的武器又不是只有卫星导航这一种导航方式。

导弹上用的景象匹配咱们暂且不论,我军的武器装备中还有一种导航方式被广泛应用,那就是惯性导航。

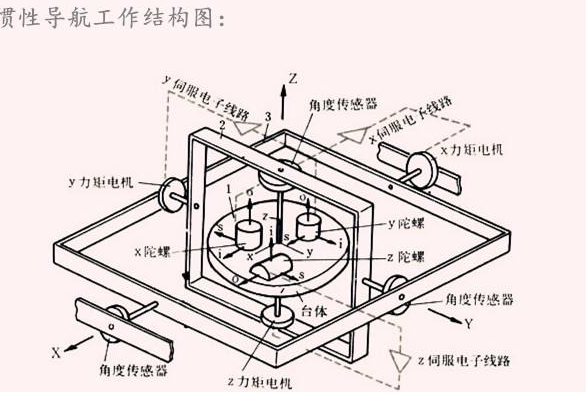
前面我们讲过,导航要解决的问题就是从哪里来,到哪里去的问题,而要使用惯性导航就需要先知道自己的初始位置和初始朝向(姿态),还要知道自己每一时刻朝向改变量和相对朝向,然后在单位时间内进行累积计算,最终得出现在的朝向和位置。
那么要想知道自己的方向和位置是如何改变的,就要依靠惯性器件了,通常是加速度计和陀螺仪,其中,加速度计利用 a=F/M原理来测量“惯性力”,陀螺仪负责测量角速度。

陀螺仪测量角速度的过程是比较有意思的。我们知道,当一个高速旋转的陀螺立在平面上时,如果推一下它的上面,那么它会立刻向受力的方向径直移动,这就是陀螺的进动性。
而在手指推力的作用下,高速旋转的陀螺又会在倾斜后,迅速重新恢复之前的直立姿态,这体现的是陀螺的定轴性。

这两个特性就是陀螺仪测量角速度的基础。就拿飞机、导弹等系统上常用的动力调谐挠性陀螺仪来说吧。
它由内挠性杆、外挠性杆、平衡环、转子、驱动轴和电机等组成。它的陀螺转子为外缘向下延伸成环形凹槽的圆盘,装在弹性支承装置上。挠性接头也就是一个具有弹性的轴,一般采用整体式动力调谐式挠性接头。
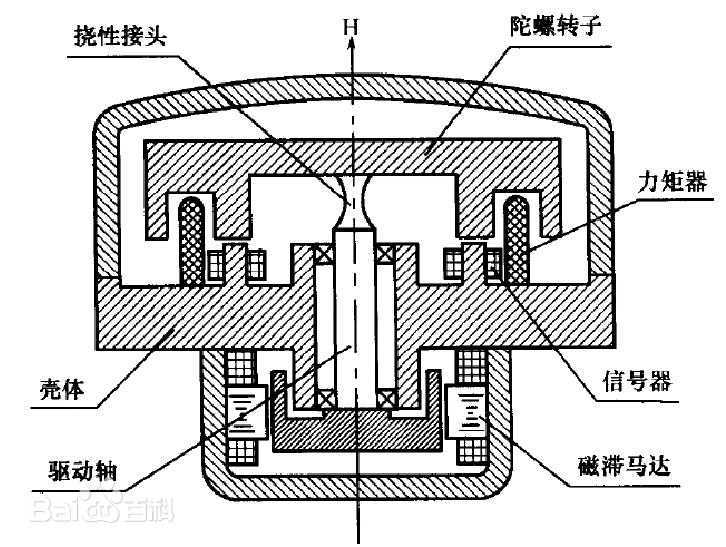
驱动电机是一个磁滞马达,其转轴便是转子的自转轴;信号器由对称安装、反向串联的两个线圈及有关磁路组成;力矩器用来沿两进动轴对转子施加修正力矩或补偿力矩。
由于平衡环扭摆运动时产生的动力反作用力矩(陀螺力矩),可以平衡挠性杆支承产生的弹性力矩,所以当它正常工作时,驱动电机高速旋转,通过内挠性轴带动平衡环转动,平衡环再通过外挠性轴带动陀螺转子旋转,转子此时就会成为一个无拘无束的自由转子。
在不受外力干扰的情况下,挠性陀螺仪的自转轴与驱动轴在同一条轴线上,但一旦物体的姿态发生改变,也就是陀螺仪在受到外力干扰或壳体转动时,自转轴和驱动轴便不在同一轴线上,此时传感器就会感知偏移量,从而计算出角速度。
这个听起来比较复杂,其实原理很简单,说白了就是当承载高速旋转陀螺的平台发生姿态变化时,陀螺会发生偏移,测量这个偏移量就知道平台的角速度变化了。

至于初始位置和方向,咱们不是有地图嘛,再不济总能查到现地位置嘛,直接输入坐标就可以了,而且陀螺仪本身也能寻北,这下初始位置和方向都有了,剩下的就是如何进行计算修正了。
而且这个惯性导航仪还有一点好,就是卫星导航无法即时发现终端的速度和方向变化的,得等跑了一段距离之后才能测出,而陀螺仪则能够在方向和速度改变的瞬间即时测出,从而能让导航软件及时的修改导航路线。

这挠性陀螺仪这也不是啥新鲜事物,早在上世纪60年代就开始发展起来了,由于结构简单、精度高、成本低,应用相当广泛,不光飞机和导弹上有,有些大型装备车辆上的导航设备上其实都安装的有这个陀螺仪。
所以,真要是到卫星导航全被切断的那一天,咱们依然还是可以利用惯性导航这样的手段来行军的,毕竟你新北市再复杂,总得有地物和地貌特征吧,只要定上一个点,下面想去哪不就去哪儿了嘛。

至于实在没有惯性导航设备的小分队,地图和指北针咱都有吧,每年基础训练里的识图用图科目不就是干这个用的吗,还愁去台北会迷路?
还是劝台湾这些“砖家”们多看书,少忽悠了吧!
上一篇:没有了
下一篇:奥地利防长:西方允许乌方使用其武器打击俄境内“越线”
下一篇:奥地利防长:西方允许乌方使用其武器打击俄境内“越线”
相关资讯
-
奥地利防长:西方允许乌方使用其武器打击俄境内“越线”
- 业务范围 2024-06-14
- 据奥地利《新闻报》当地时间8日报道,奥地利国防部长坦纳在接受采访时表示,一些西方国家允许乌克兰使用其武器打击俄罗斯境内的目标,这一做法“越线”了。 5日,俄罗斯总统普京曾表示,西方向乌克兰提供武器就是直接参与俄乌冲突,是“非常危险的一步”。...
-
残奥会四连冠!在黑暗中投掷,39岁张亮敏再夺铁饼冠军
- 业务范围 2024-09-09
- \n 上观新闻 消息,昨天,在巴黎残奥会女子铁饼F11级决赛中,39岁的上海姑娘张亮敏夺冠。张亮敏是残奥会的“六朝元老”,这次已经是她连续第四届斩获该项目金牌。 \n “亮亮每次比赛我们都紧张得要命,不敢看直播。昨晚残联的老师给我打电话说女...
-
“我们真的想要一个食品行业卡特尔化的美国吗?”
- 业务范围 2024-07-21
- 【文/埃里克施劳瑟,翻译/陈佳芮 校对/郭涵】 美国联邦贸易委员会刚刚发布了一份备受期待的报告,证实了可能发生的最坏情况:在新冠疫情期间,美国的食品杂货供应链遭受了严重破坏。 报告称,大型食品杂货企业将疫情视作机会。在食品短缺的背景下,它们...